

Manipolazione robotica di oggetti morbidi e deformabili
Il settore industriale che si occupa della produzione di oggetti morbidi e deformabili è uno dei più sfidanti per il mondo della robotica e dell’automazione.
Per poter lavorare in questo ambito, un robot deve essere in grado di manipolare oggetti che non solo presentano dimensioni molto diverse tra loro, ma che anche cambiano forma, con il rischio in alcuni casi di danneggiarsi, sotto l’azione di forze esterne.
É quindi necessario che di volta in volta il robot sia in grado di adattare le strategie di movimento e di presa per poter gestire al meglio le complesse interazioni con gli oggetti deformabili con cui deve lavorare.
Leggi anche l'articolo: "CoV Advance Robotics: l'automazione dei processi per ottimizzare il business" per scoprire in che modo la robotica ha consentito un cambio di prospettiva aziendale.
APRIL, un cobot abile e autonomo
È in questo scenario che nasce APRIL (multipurpose robotics for mAniPulation of defoRmable materIaLs in manufacturing processes), un progetto europeo che mira a sviluppare un cobot abile e autonomo, a basso costo, capace di adattarsi a vari scenari di produzione e manipolare prodotti e materiali di diversa forma e consistenza, anche in collaborazione con un partner umano.
APRIL è un progetto finanziato dalla Commissione Europea, nell’ambito di Horizon 2020 - Factories of the Future (FoF). Prensilia srl, una spin-off dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna che ad oggi commercializza mani robotiche per ricerca ed istruzione in tutto il mondo, fa parte del consorzio interdisciplinare coordinato dall’Universidad Politécnica de Madrid e formato da 15 partner europei provenienti dal mondo della ricerca e delle imprese.
Vuoi sapere in che modo inserire il robot di ultima generazione all'interno della tua impresa, permettendoti di migliorare la sicurezza sul lavoro e ottimizzare i processi?

Un sistema di presa di ultima generazione
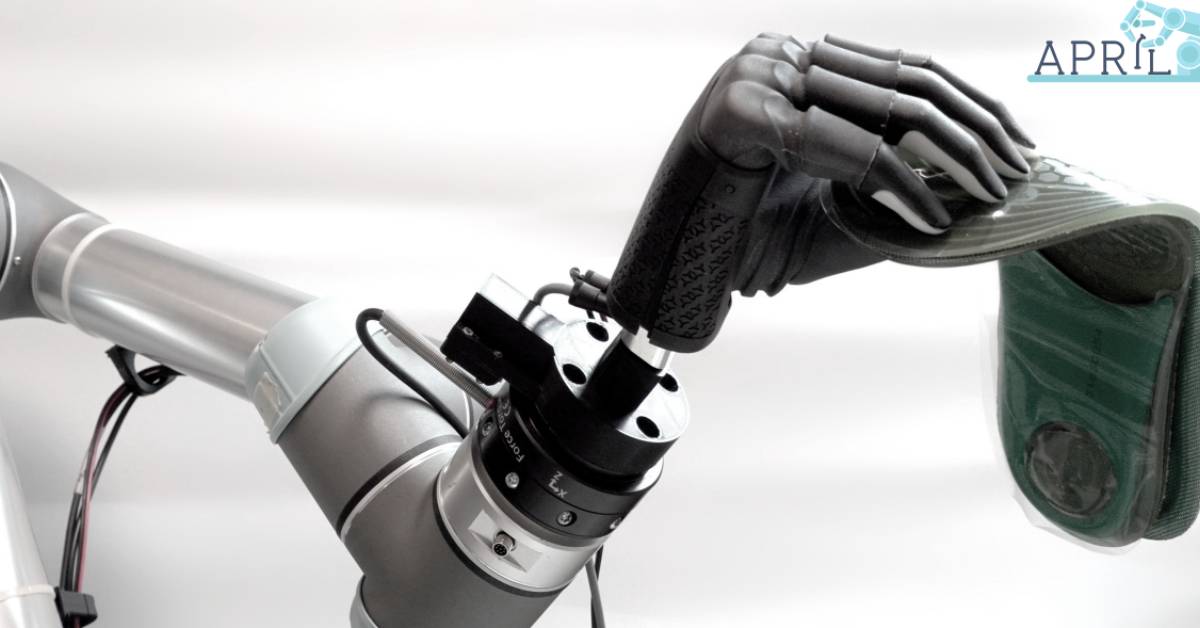
Obiettivo principale di Prensilia all’interno del progetto APRIL è quello di fornire all’innovativo sistema robotico un sistema di presa di ultima generazione in grado sia di eseguire la manipolazione di oggetti che di interagire in sicurezza con i lavoratori.
Il sistema di presa scelto per questo progetto è stata Mia Hand, un nuovo gripper antropomorfo sviluppato da Prensilia e dotato di tre motori, di un sistema di controllo embedded e di sensori di posizione, velocità e forza bi-assiale. Un morbido materiale in gomma ricopre i polpastrelli della mano, permettendo una buona aderenza delle dita agli oggetti e aumentando la stabilità della presa, mentre un guanto in silicone con una copertura nera in plastica rigida protegge il dorso e il palmo della mano, dove sono alloggiati motori e circuiti elettrici.

Leggi anche l'articolo: "Lo stato dell'arte della robotica avanzata in Italia"
I vantaggi di Mia Hand
Uno dei più importanti vantaggi che la mano robotica Mia è in grado di offrire è quello di poter eseguire diversi tipi di prese. Ciò è fondamentale per il progetto APRIL perché implica che con un unico gripper il suo sistema robotico può afferrare e manipolare diversi oggetti, strumenti e materiali adattando automaticamente le strategie di presa.
Inoltre, per aumentare la destrezza della propria piattaforma robotica il progetto APRIL sta sostenendo la ricerca svolta da Prensilia cha ha come fine ultimo quello di sviluppare e integrare nelle dita della mano Mia dei nuovi sensori in grado di eseguire una misura delle forza tri-assiale ed anche di restituire il punto di applicazione di tale forza sul dito.
Avere accesso a questo tipo di informazioni potrebbe infatti permettere al sistema automatizzato di gestire con più facilità le complesse e delicate interazioni fisiche che hanno luogo sia durante la manipolazione di oggetti piccoli e/o deformabili sia durante la collaborazione con partner umani.
L’interazione con i partner umani
La piattaforma robotica di APRIL è stata predisposta per interagire in totale sicurezza con i lavoratori migliorandone l’efficienza produttiva. E anche su questo punto l’uso di Mia come end-effector può offrire numerosi vantaggi.
Il suo design e la sua somiglianza ad una mano umana la rendono ideale per essere usata in scenari dove è necessaria una interazione o fisica o sociale con un umano, aumentando la qualità percepita dell’interazione e il grado di accettazione dei robot negli ambienti produttivi da parte dei lavoratori.
Scopri come questo progetto può aiutarti a migliorare le tua impresa!





 Le conclusioni sono state affidate ad Antonio Mazzeo, Presidente del Consiglio Regionale Toscana.
Un focus speciale è stato dedicato al Progetto Amesphere di AME, uno dei beneficiari del finanziamento, che migliora la gestione della sicurezza con una piattaforma per l’analisi in tempo reale dei rischi grazie all’uso di sensori di prossimità, telecamere e sistemi laser.
Le conclusioni sono state affidate ad Antonio Mazzeo, Presidente del Consiglio Regionale Toscana.
Un focus speciale è stato dedicato al Progetto Amesphere di AME, uno dei beneficiari del finanziamento, che migliora la gestione della sicurezza con una piattaforma per l’analisi in tempo reale dei rischi grazie all’uso di sensori di prossimità, telecamere e sistemi laser.

 L’innovatività del progetto risiede proprio nella capacità di questo EVA di creare autonomamente la propria Knowledge Base, bypassando la necessità degli enterprise virtual assistant attualmente sul mercato di dover disporre di una grande base di conoscenza e di risorse che ne effettuino l’addestramento manuale specifico per poter funzionare. La funzione aziendale target di Jiminy è quella del “Customer Care” (CC). Tale funzione è stata scelta perché trasversale alla quasi totalità delle aziende e, solitamente, caratterizzata da grossi problemi di scalabilità dovuti al grande stress che il personale, sottoposto a forti pressioni tipiche del settore, vive. Oltre che un EVA in grado di supportare gli operatori CC durante le normali attività lavorative, con Jiminy ci si prefigge di realizzare un copilota in grado di facilitare anche la formazione di nuove risorse poichè potrà generare automaticamente telefonate di training, simulando conversazioni basate su interazioni passate, con cui i nuovi operatori potranno sperimentare e imparare a gestire situazioni versomili in un contesto di comfort e sicurezza.
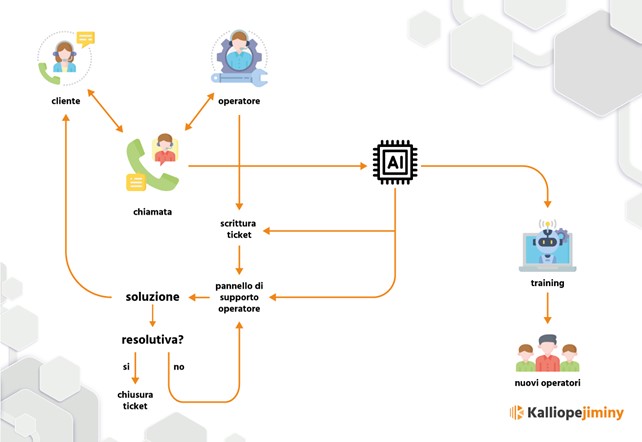
Il funzionamento di Jiminy si può riassumere come segue:
quando un cliente chiama, viene accolto da un voicebot che effettua un primo triage del problema; le informazioni raccolte vengono utilizzate per creare automaticamente un ticket, che viene poi verificato da un operatore umano. Durante la chiamata, Jiminy ascolta e analizza la conversazione, fornendo suggerimenti in tempo reale all'operatore basandosi sulla sua conoscenza accumulata. In un secondo momento, questa stessa conoscenza viene riutilizzata per creare degli scenari simulati con cui i neo assunti possono “allenarsi”.
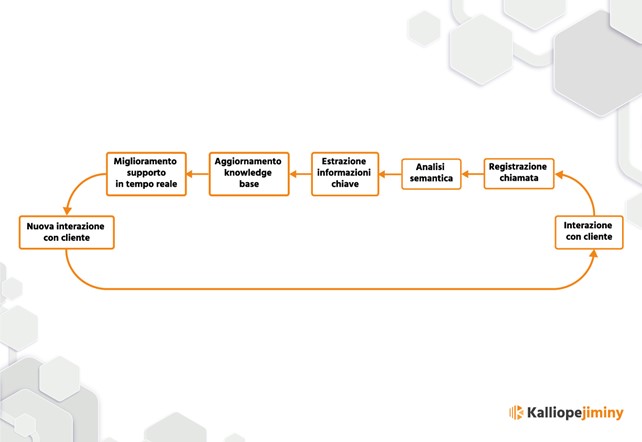
Il funzionamento di Jiminy si articola in diversi passaggi:
L’innovatività del progetto risiede proprio nella capacità di questo EVA di creare autonomamente la propria Knowledge Base, bypassando la necessità degli enterprise virtual assistant attualmente sul mercato di dover disporre di una grande base di conoscenza e di risorse che ne effettuino l’addestramento manuale specifico per poter funzionare. La funzione aziendale target di Jiminy è quella del “Customer Care” (CC). Tale funzione è stata scelta perché trasversale alla quasi totalità delle aziende e, solitamente, caratterizzata da grossi problemi di scalabilità dovuti al grande stress che il personale, sottoposto a forti pressioni tipiche del settore, vive. Oltre che un EVA in grado di supportare gli operatori CC durante le normali attività lavorative, con Jiminy ci si prefigge di realizzare un copilota in grado di facilitare anche la formazione di nuove risorse poichè potrà generare automaticamente telefonate di training, simulando conversazioni basate su interazioni passate, con cui i nuovi operatori potranno sperimentare e imparare a gestire situazioni versomili in un contesto di comfort e sicurezza.
Il funzionamento di Jiminy si può riassumere come segue:
quando un cliente chiama, viene accolto da un voicebot che effettua un primo triage del problema; le informazioni raccolte vengono utilizzate per creare automaticamente un ticket, che viene poi verificato da un operatore umano. Durante la chiamata, Jiminy ascolta e analizza la conversazione, fornendo suggerimenti in tempo reale all'operatore basandosi sulla sua conoscenza accumulata. In un secondo momento, questa stessa conoscenza viene riutilizzata per creare degli scenari simulati con cui i neo assunti possono “allenarsi”.
Il funzionamento di Jiminy si articola in diversi passaggi:


 Inoltre, oltre il
Inoltre, oltre il 
 Se si vuole brevettare il metodo, la tutela viene offerta a uno specifico metodo, implementato attraverso un computer, che comprende una serie di fasi dettagliatamente descritte, per istruire una rete neurale da utilizzare per ottenere un determinato risultato tecnico.
Il fatto che il metodo sia attuato con un hardware e che serva per ottenere un risultato tecnico lo priva dell’astrattezza teorica e lo rende brevettabile. Anche se lo scopo è limitato, la protezione che si ottiene è molto alta.
Si può brevettare anche il programma per computer che attua le fasi del metodo di cui abbiamo appena detto che viene utilizzato per raggiungere un risultato tecnico.
Apparentemente sembra che si tratti della stessa protezione, ma se c’è una
Se si vuole brevettare il metodo, la tutela viene offerta a uno specifico metodo, implementato attraverso un computer, che comprende una serie di fasi dettagliatamente descritte, per istruire una rete neurale da utilizzare per ottenere un determinato risultato tecnico.
Il fatto che il metodo sia attuato con un hardware e che serva per ottenere un risultato tecnico lo priva dell’astrattezza teorica e lo rende brevettabile. Anche se lo scopo è limitato, la protezione che si ottiene è molto alta.
Si può brevettare anche il programma per computer che attua le fasi del metodo di cui abbiamo appena detto che viene utilizzato per raggiungere un risultato tecnico.
Apparentemente sembra che si tratti della stessa protezione, ma se c’è una